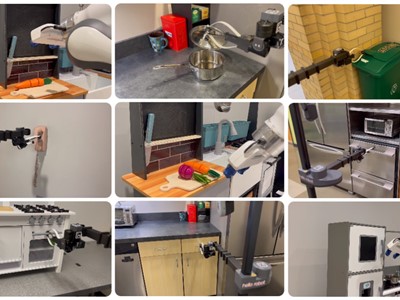
Istraživanje skupine znanstvenika s američkog sveučilišta Carnegie Mellon iz Pittsburgha proširilo je mogućnosti “učenja” za pametne kućne robote i na nestrukturirane izvore znanja, poput običnih video zapisa, primjerice s YouTubea. Njihovi su roboti tako uspješno naučili obavljati svakodnevne kućne poslove i jednostavne zadatke, kao što su otvaranje ladice, poklopca ili pećnice, uklanjanje lonca sa štednjaka ili uzimanje određenih kućnih predmeta.
Obuka za te zadatke odvijala se na način da su roboti dobivali video zapise ljudi na kojima se može vidjeti kako ljudske ruke izvode željene radnje ili su uživo gledali ljude koji obavljaju te poslove. Njihova se metoda zove VRB (Vision-Robotics Bridge) i temelji se na ranije poznatom WHIRL (In-the-Wild Human Imitating Robot Learning) procesu. U njemu nije potrebno imati živog demonstratora, već se može učiti samo putem videa i potom naknadnim vježbanjem robota u stvarnim uvjetima.
Jednostavniji zadaci mogu se na ovaj način uvježbati oko 25 minuta. Ključna je pritom metoda dostupnosti, pri kojoj roboti gledajući snimke identificiraju ključne točke u prostoru za obavljanje nekog zadatka (primjerice, točku gdje treba primiti ručku ladice), kao i bitne smjerove pokreta. Nakon gledanja nekoliko video zapisa, roboti su sposobni “naučiti” kako obaviti taj zadatak (npr., otvoriti bilo koju drugu ladicu).
Već službenoj GitHub stranici projekta moguće je pronaći potpuni tehnički opis ove metode učenja i pogledati niz videa s primjerima korištenja takvih robotskih ruku u praksi. O metodi VRB napisan je znanstveni rad koji je dostupan na ovom mjestu.
Više o temiIzvor:Bug.hr




{kind=link}